Negli ultimi anni gli operatori del settore applicativo che comprende la posa di pavimenti all’interno delle abitazioni hanno realizzato un salto tecnologico e un miglioramento delle proprie condizioni di lavoro grazie all’utilizzo di macchine mobili montate su autocarro per la produzione e il pompaggio di massetti e sottofondi. Le condizioni di posa all’interno delle abitazioni, invece, sono rimaste pressoché invariate e lai operazioni relative alla distribuzione e alla stesa del materiale miscelato viene ancora affidata al lavoro manuale degli stessi operai specializzati. Il materiale semi-asciutto generalmente viene scaricato tramite la cosiddetta “capra” – un cavalletto sopraelevato collegato con il tubo di pompaggio – e la successiva stesa del materiale è effettuata con l’ausilio di una semplice pala manuale. Solo per la fase successiva delle lavorazioni, il mercato offre da tempo dei robot di spianatura che entrano in campo dopo che il materiale è stato precedentemente distribuito e preparato manualmente dagli operatori.
Blend ha creduto alle possibilità attuali dell’automazione di questo processo. Dopo il successo di pubblico conquistato in collaborazione con Cifa per l’impianto Easyfloor di pompaggio in continuo dei materiali asciutti e autolivellanti, Blend ha progettato un veicolo robotizzato con sistema di locomozione basato su cingoli, dedicato alla distribuzione automatica del materiale e al compattamento, livellamento e lisciatura di massetti e sottofondi per i pavimenti all’interno delle abitazioni.
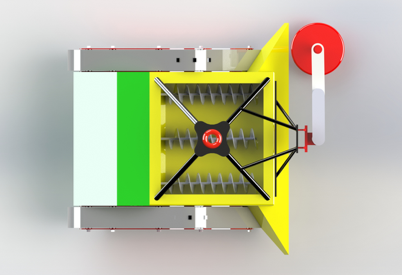
Questo robot cingolato ha una vasca di carico che riceve il materiale pompato in continuo da una torretta fissata al telaio del robot stesso e lo convoglia verso un banco di stesa che ha una larghezza di lavoro di circa 1.350 mm. La funzione è simile a quella di una finitrice stradale di dimensioni ridotte con l’aggiunta di un braccio robotico che può muoversi da destra e sinistra con un disco rotante. Il veicolo è completamente elettrico ed alimentato con batterie al gel, isolate ed ermetiche, per un’autonomia di almeno sei ore. Dotato del sistema di rilevamento perimetrale dell’area di lavoro e calcolo del percorso ottimale, il robot esegue la posa con controllo laser dell’altezza del massetto.